Tim John Joseph
Ph.D.
Personal webpage
Tim is a recent Ph.D from the Advanced Dynamics Lab of the Mechanical Engineering Department at IIT Bombay. His research interests are in the areas of precision mechatronics, nanopositioning, dynamics & control, systems design, and smart systems. Hes is currently looking for post-doctoral positions in academia and industry in the areas of high-speed scanning probe microscopy and other precision dynamics applications.
His doctoral work was on the 'Integrated Design of Sensing, Drive, and Scanning Systems for High-Speed Nanopositioning' and was motivated by the need for further and fundamental engineering advances in sensing, drive, and scanning technologies to enable nanopositioning at much higher speeds. This would address the primary limitation of scanning probe microscopy (SPM) — the large amount of time needed to produce an image, due to the low scanning speeds — and enable 'video-rate' SPM. The research followed a systems approach to enhancing the overall bandwidth (without compromising on the required precision) through concerted improvements in each of the above technologies. The specific issues that were addressed in the thesis are listed below:
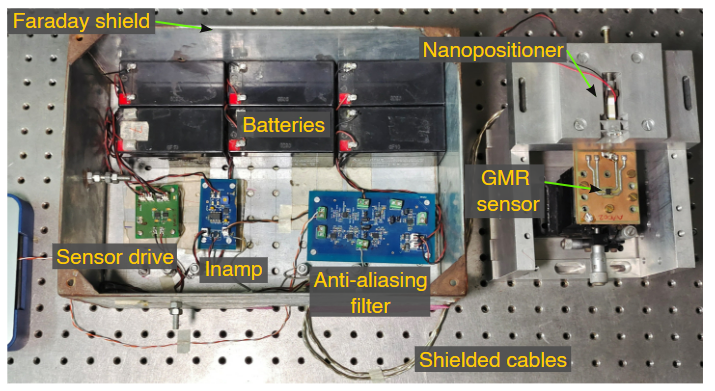
Nanometer-resolution position sensing: Achieving the required precision for nanopositioning necessitates feedback control, and the position sensor is a critical component of the feedback system. Enhancing the position sensing bandwidth is challenging due to the increase in noise with bandwidth. Giant magnetoresistance (GMR) sensors have proven to be a remarkable alternative to conventional sensors for their advantages of a small form factor and simple readout scheme, enabling collocated dynamic behaviour. However, GMR sensors exhibit significantly higher current-dependent 1/f noise, due to which incremental enhancements in the drive current produce diminishing improvements in SNR. Therefore, ensuring minimal excess noise generation, pickup, and propagation through the system is key to achieving the required SNR. The noise interactions between the sensor and readout circuit components were analyzed, and methods to improve the SNR were investigated. The theoretically estimated noise levels provided a benchmark for practical implementations. Based on the analysis, a low-noise readout circuit for the GMR sensor was developed, achieving a resolution of 2.46 nm over 100 kHz, a ten-fold improvement over previously reported performance (Kartik et al. 2012).

|

|
|---|
|
|---|
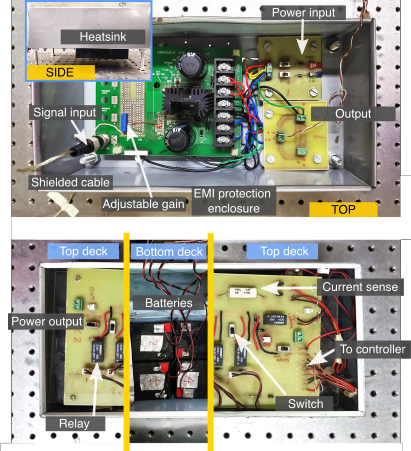
High-speed drive electronics for piezoelectric actuators: The drive requirements for high-speed scanning were investigated, which are severe, particularly due to the high capacitance of the piezoelectric actuator's (piezo) that are typically employed. The actuator capacitance leads to frequency-dependent behaviour, which causes amplifier stability issues and increased output current demand at high bandwidths. Output noise, which affects the actuator's positioning precision, also increases with bandwidth and must be minimized. The amplifier's power supply was identified as the primary limitation in conventional systems and the critical link in achieving the required power bandwidth and noise performance. A alternative battery-power-based power amplifying topology was investigated, and a device suitable for driving highly capacitive loads, such as piezos, was developed. The developed system supplies a peak output voltage of 150 V and RMS current of 3.3 A and can drive a 1 μF load over a power bandwidth of 5 kHz. The maximum (no load) noise at the output was 3.67 mV.

|

Amplifier bandwidth for different loads (blue line-type). For low capacitances, the bandwidth is limited by fSR while at higher capacitances it is limited by Imax. The orange line-type indicates the output current corresponding to the power bandwidth. |
|---|
|
|---|
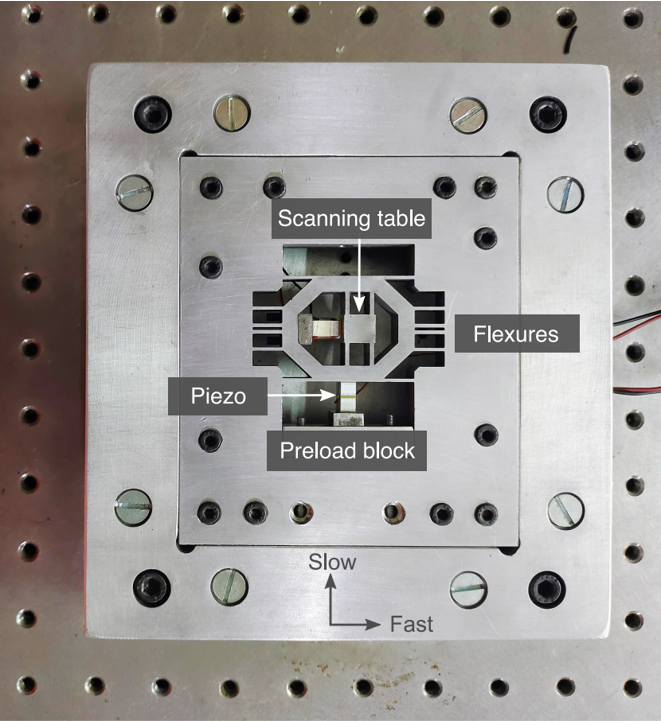
Two-axis high-speed scanning: The achievable bandwidth of a two-axis nanopositioning scanner is limited due to the increase in coupled behaviour between the individual stages with scanning speed. The lack of controllability in the out-of-plane direction necessitates proper ordering of the scanner's eigenmodes to minimize vibrations in that direction. The interplay between the two stages was investigated, and performance degrading design characteristics were identified. Analytical relations for the various performance metrics were derived. Parametric studies were performed to identify methods to raise the scanner's eigenfrequencies while reducing parasitic motion. A novel `Hexa' scanner was developed that significantly improved upon the achievable performance. The developed scanner achieved a bandwidth of 21.32 kHz and 8.82 kHz along the fast- and slow-axis, respectively, and a workspace of 8.99 μm x 9 μm.
|
|---|

(Left) Frequency response of the scanner’s fast-and slow-stages when actuated along the primary axis. (Right) Coupling onto the fast-axis when actuated along the slow-axis and vice-versa. |
|---|
|
|---|
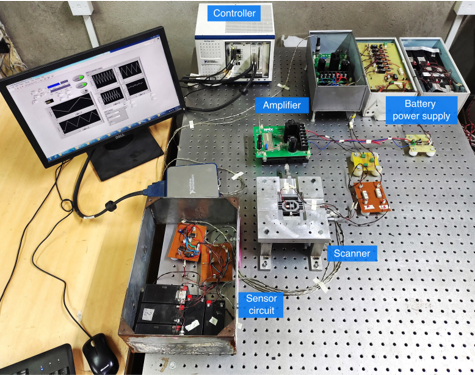
The developed sensing, drive, and scanning systems were integrated into a closed-loop control system. Experiments were performed to test the overall system’s performance. High-speed scanning up to 500 Hz in open-loop was demonstrated. No distortions in the tracked trajectory were detected. Two-axis Lissajous pattern scanning was also performed with frequencies of 200 Hz and 141 Hz along the x- and y-axis respectively. Due to the design improvements to the individual subsystems, remarkable high-speed scanning performance was achieved even in open-loop. The residual error due to the piezo’s nonlinearities was compensated through closed-loop control. Hardware-in-the-loop simulations were performed prior to implementation on the actual system.
|
|
|---|
|
|
|---|
Publications
Patents
Tim John Joseph and V. Kartik, "A Power Amplifying and Supply Device", Indian Patent No. 416967, Feb. 7, 2022.
Journal Articles
Tim John Joseph and V. Kartik, "Achieving low-noise, high-bandwidth, nanoscale- resolution position sensing with GMR sensors", Under review : IEEE Transactions on Instrumentation & Measurement, 2022. Preprint: https://doi.org/10.36227/techrxiv.21062659.v1
Conference Proceedings
Tim John Joseph and V. Kartik, "Analytical relations for the cross-coupling in a serial-kinematic positioning stage", IFToMM Asian Mechanism and Machine Science Conference, Bengaluru, India, 14th-17th December 2018.
Tim John Joseph and V. Kartik, "Nanometer Resolution Dynamic Displacement Measurement in Industrial/High Noise Environments", Proceedings of the IEEE International Conference on Industrial Technology (ICIT-2016), Taipei, Taiwan, 14th-17th March 2016.
Tim John Joseph and V. Kartik, "A Compact Low Cost Position Sensing System for Space Interferometry Subsystems", 10th National Symposium and Exhibition on Aerospace and Related Mechanisms (ARMS 2016), Thiruvananthapuram, India, 14th-17th December 2016.
Vaibhav Sabade, Tim John Joseph, V. Kartik, "Optimal Design of a High Speed Nanopositioner using Analytical Methods" , International Conference on Vibration Problems, IIT Guwahati, Assam, India, December 2015.
Vaibhav Sabade, Tim John Joseph, V. Kartik, "An Analytical Design Methodology for High Speed Nanopositioning Scanners", ASME International Mechanical Engineering Congress and Exposition, Houston, Texas, USA, November 2015.
Biography

Tim is a recent Ph.D from the Mechanical Engineering Department of IIT Bombay and was a member of the Advanced Dynamics Lab under Prof. V. Kartik.
He graduated from M.A. College of Engineering (M.G. University) in 2009 with a B.Tech in Mechanical Engineering. He did his Master’s in Mechanical Engineering at IIT Bombay, specializing in Design and Robotics. His thesis was on a bio-inspired hexapedal robot driven by mechanical linkages (Video).
Website: http://homepages.iitb.ac.in/~timjohn