Autonomous Mobility Systems Lab
Bridging cyber algorithms with physical reality
Cyber-Physical Bridge: Where Virtual Logic Meets Physical Reality
We aim at perfecting the future of mobility by bridging the divide between theoretical algorithms and physical execution.
Extensive and efficient testing and validation of connected and autonomous vehicles and traffic automation algorithms is done using scale models.
Scale models
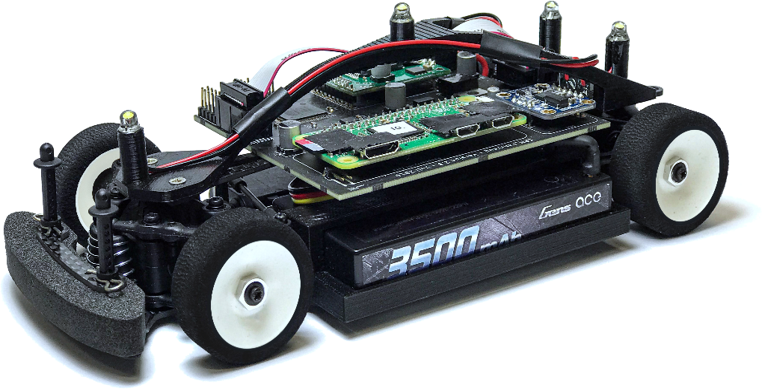
1/18th scale model
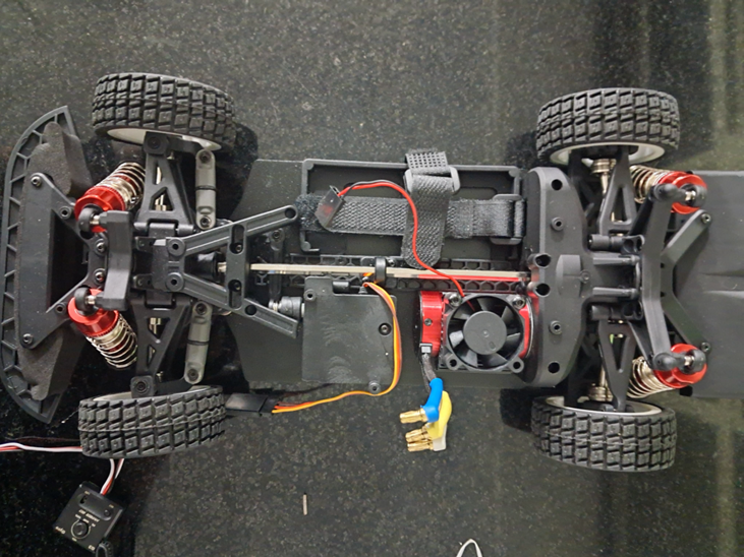
1/14th scale model

1/10th scale model
Key capabilities
Our expertise spans the entire autonomous mobility stack, integrating fundamental engineering with cutting-edge artificial intelligence.
Perception & Computer Vision
Developing advanced deep learning architectures for object detection, semantic segmentation, and lane detection specifically tailored for unstructured and chaotic environments.
Localization & Mapping (SLAM)
Implementing robust Simultaneous Localization and Mapping algorithms to maintain centimeter-level accuracy in GPS-denied or dynamic environments using LiDAR and visual data
Sensor Fusion
Fusing disparate data streams from LiDARs, Stereo Cameras, RADARs, IMUs, and GNSS to create fail-safe, redundant environmental models.
Mechatronics & Hardware Integration
Engineering custom mechanical chassis, power distribution systems, and embedded computing units to support high-performance autonomous operations.
Motion Planning & Controls
Designing path-planning algorithms (A*, RRT) and precision control loops (MPC, PID) for complex maneuvers, dynamic obstacle avoidance, and high-speed racing contexts.
Connected Mobility (V2X)
Researching Vehicle-to-Vehicle and Vehicle-to-Infrastructure communication protocols to enhance fleet coordination and traffic flow efficiency.