


27 May 2021
Presenting our LCSS paper "Cooperative Salvo Based Active Aircraft Defense Using Impact Time Guidance" at ACC 2021.

works at the intersection of graph theory, control theory, and dynamical systems. His general research agenda is to investigate the principles underlying the design and implementation of networked systems.
Abhinav's research spans across interrelated disciplines of networked control systems, both theoretical and application-oriented. A part of his research aims to offer a perspective where communication, control, computing, and information theories merge on equal terms to yield a robust solution, thereby springing up the concept of cyber-physical systems. In his endeavor, he searches for holistic approaches that unify concepts from the aforementioned realms.
Our research aims to address terminal constraints on the trajectory of an autonomous vehicle, in addition to the primary objective of target interception.
Learn more
The celebrated "the lady, the bandit, and the bodyguard" scenario. Our research offers a different viewpoint on this problem.
Learn more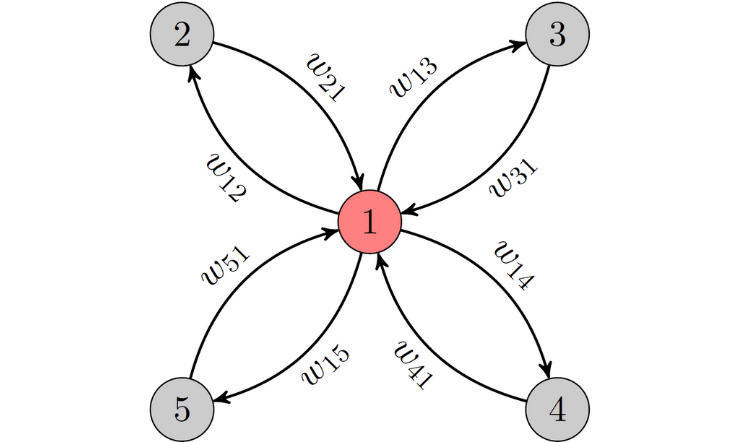
Fully distributed cooperative behavior in a multiagent system that also guarantees consensus at values that are not at the agents' average of the initial states.
Learn more
Investigating fundamental aspects in learning and control for an autonomous system, with an emphasis on learning in complex large-scale interconnected systems.
Learn more
Protocols based on local information only for formation, mapping, localization, coverage, and surveillance tasks in 2D and 3D spaces with anisotropic sensing patterns.
Learn more
Ensuring cooperation, robustness and safety of multiagent systems from misbehaving agents and malicious attacks.
Learn moreAE 305 / AE 717 (Spring Semester)


AE 410 / AE 641 (Fall Semester)
To be updated soon
To be updated soon
